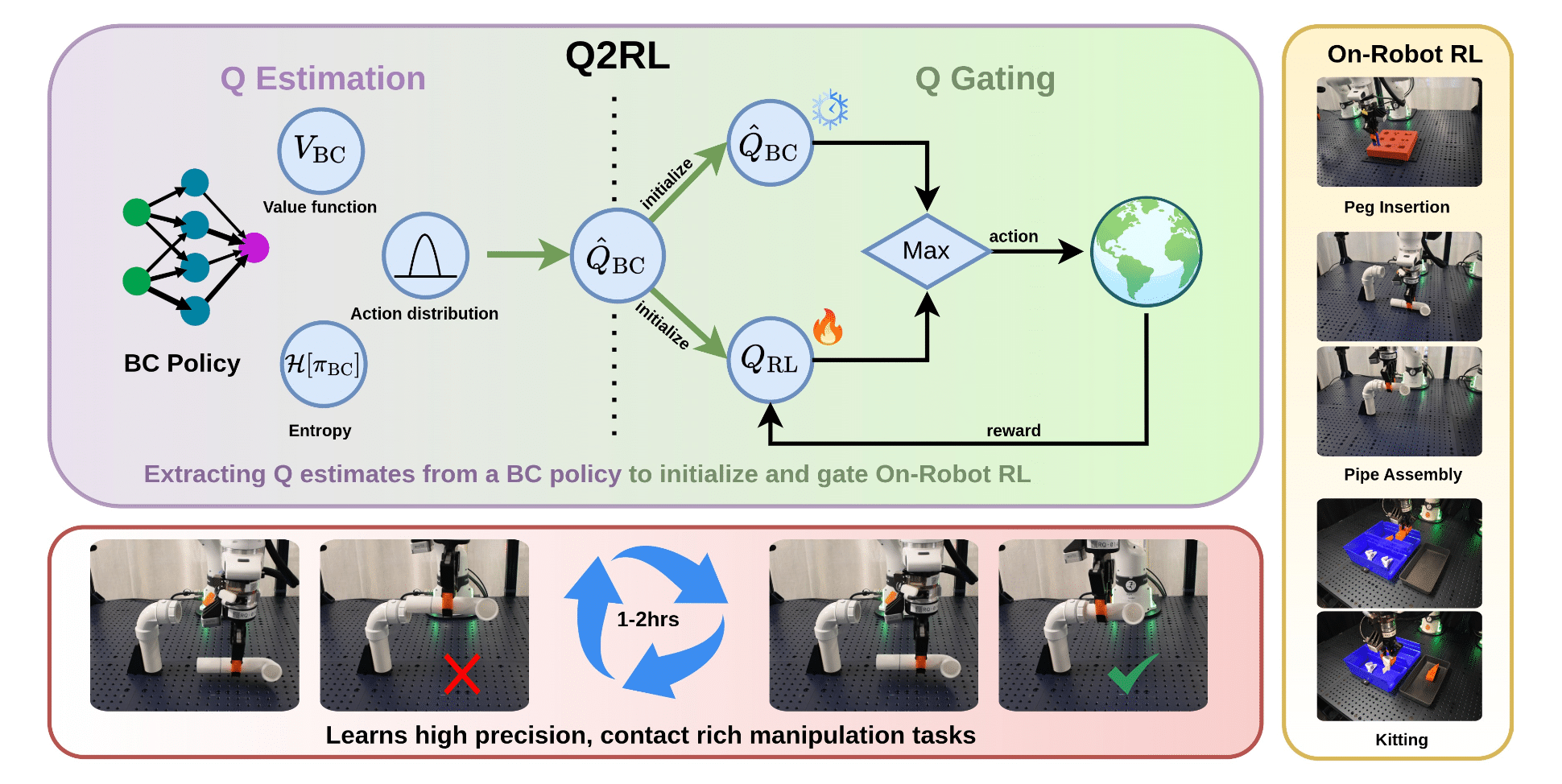
We propose Q2RL, Q-Estimation and Q-Gating from Behavior Cloning for Reinforcement Learning, an algorithm for efficient offline-to-online learning.
Resources
By Topic:
By Type:
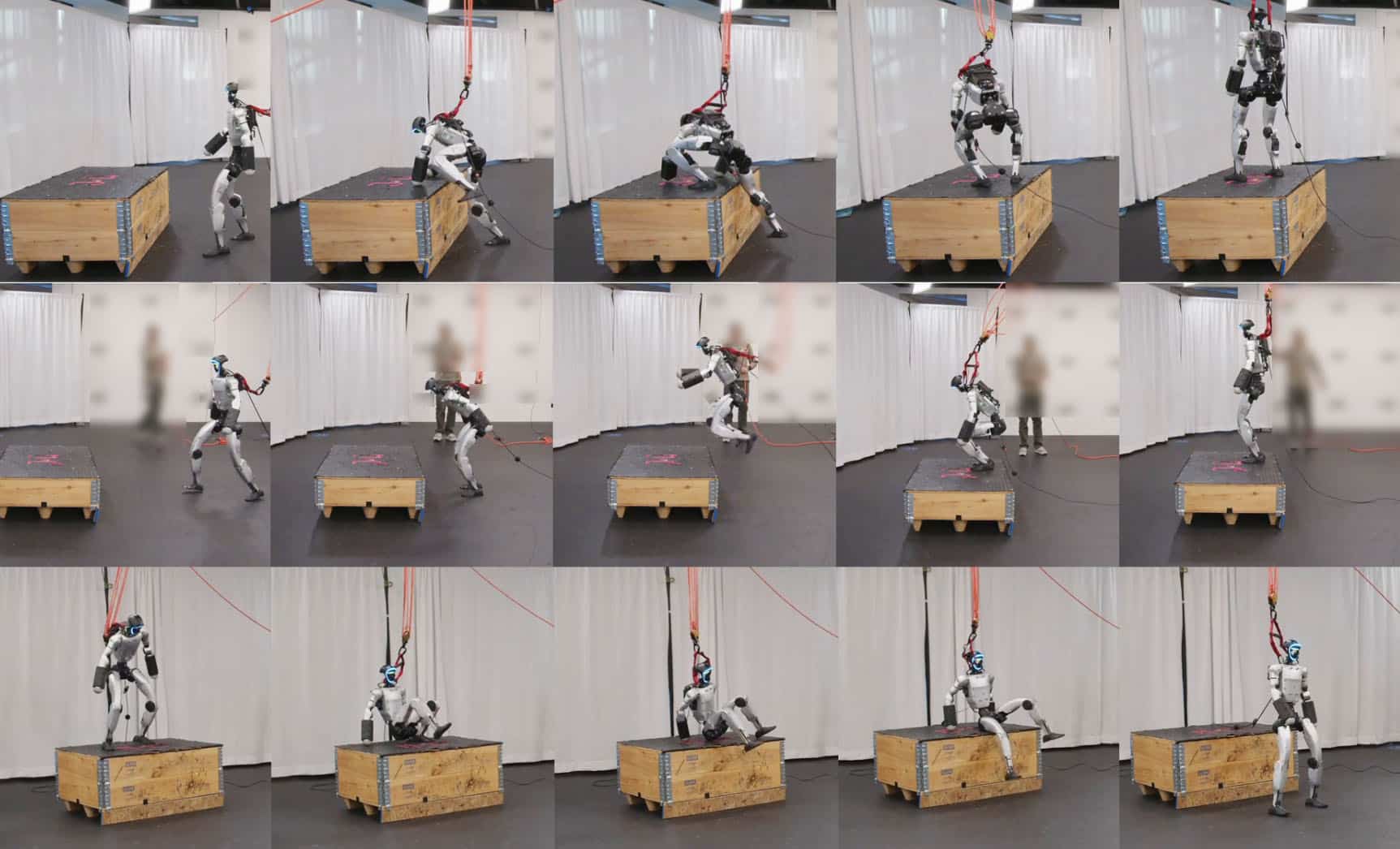
Generalizing from References using a Multi-Task Reference and Goal-Driven RL Framework
We introduce a multi-task RL training paradigm that treats reference motion as a prior for behavioral shaping rather than a deployment-time constraint.
Scaling Simulation Data Generation
How AnyTask and ExpertGen Bridge the Sim-to-Real Gap
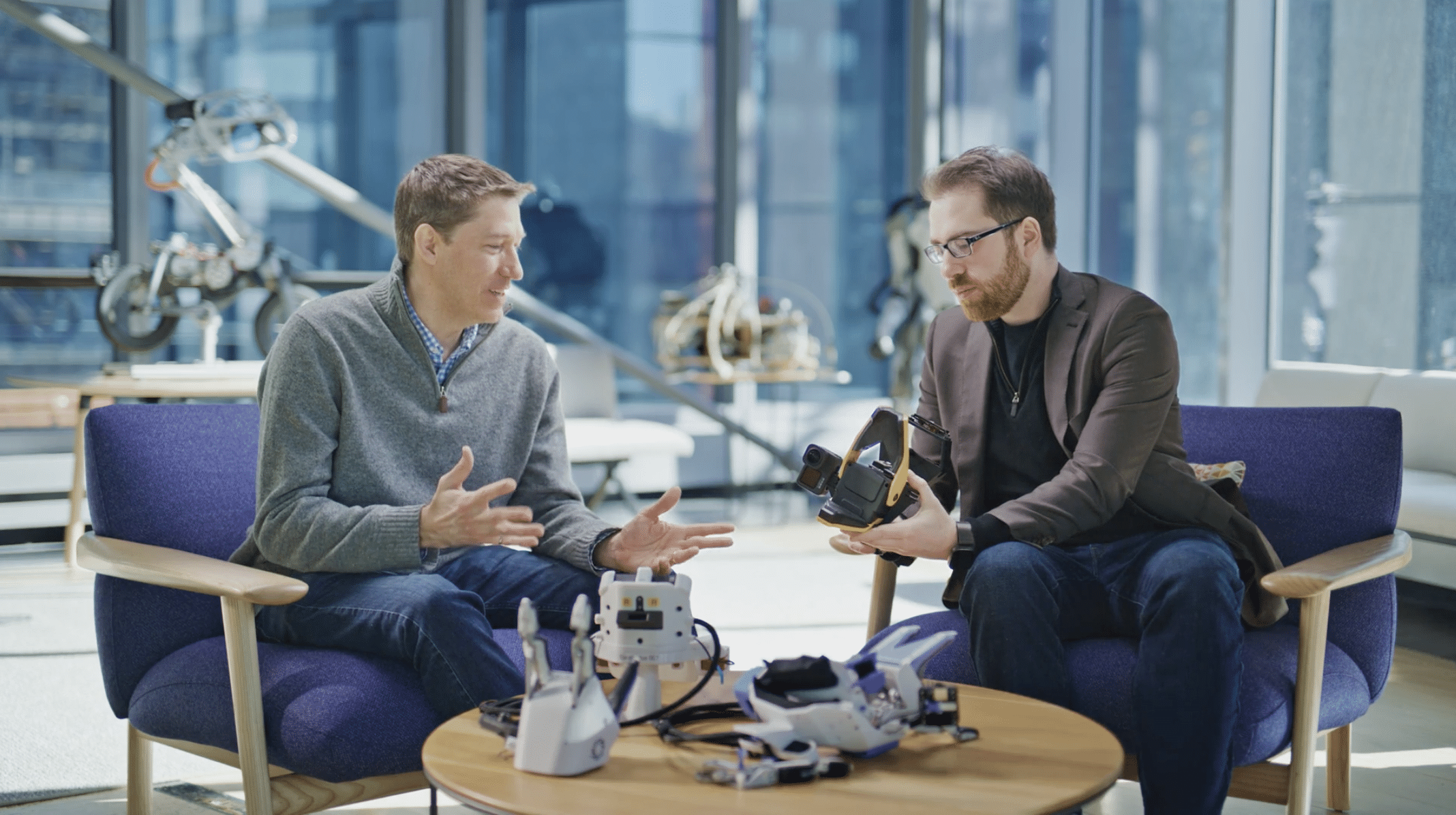
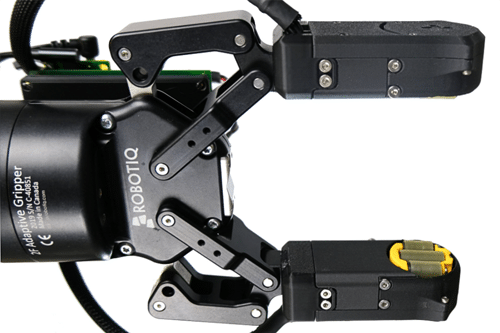
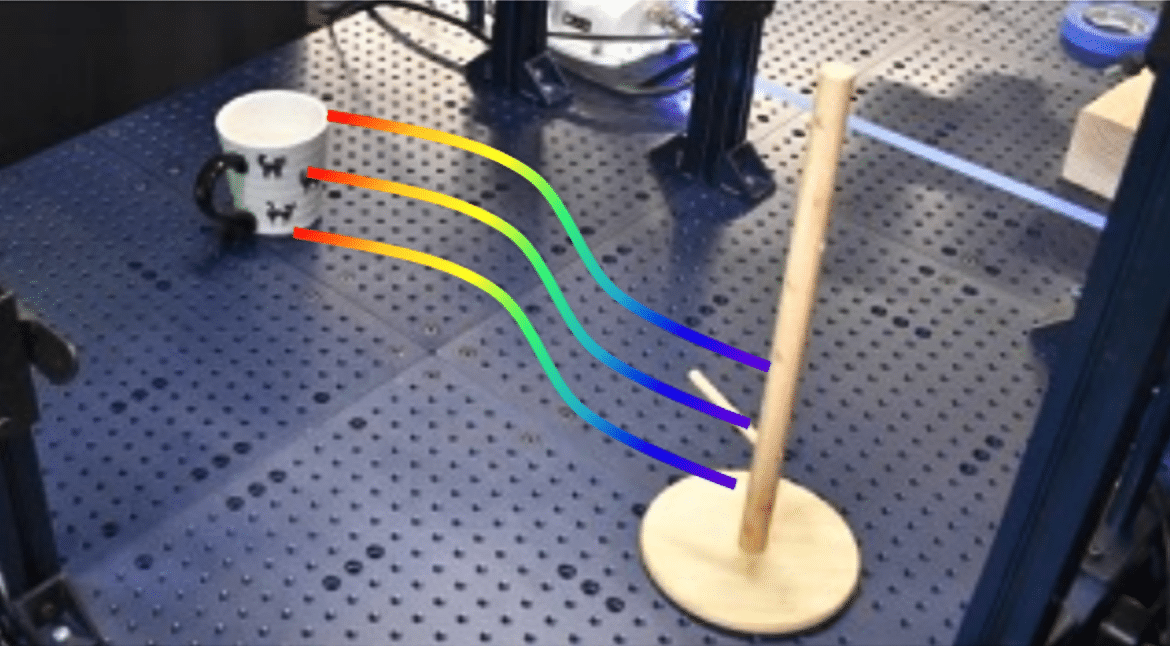
Getting a Grip on Robotic Data Collection
To make sure the data collected transfers to the robot, we’ve co-designed handheld and robot grippers: same linkage mechanisms, same degrees of freedom, same force...

Getting a Grip on Robotic Data Collection
Redesigning how we collect bespoke data for manipulation tasks.
What Makes a Job “Dull, Dirty, Dangerous?” Redefining Undesirable Work for Robotics
We propose a framework to help the robotics community explore how automation impacts jobs that are considered dull, dirty, dangerous (DDD).
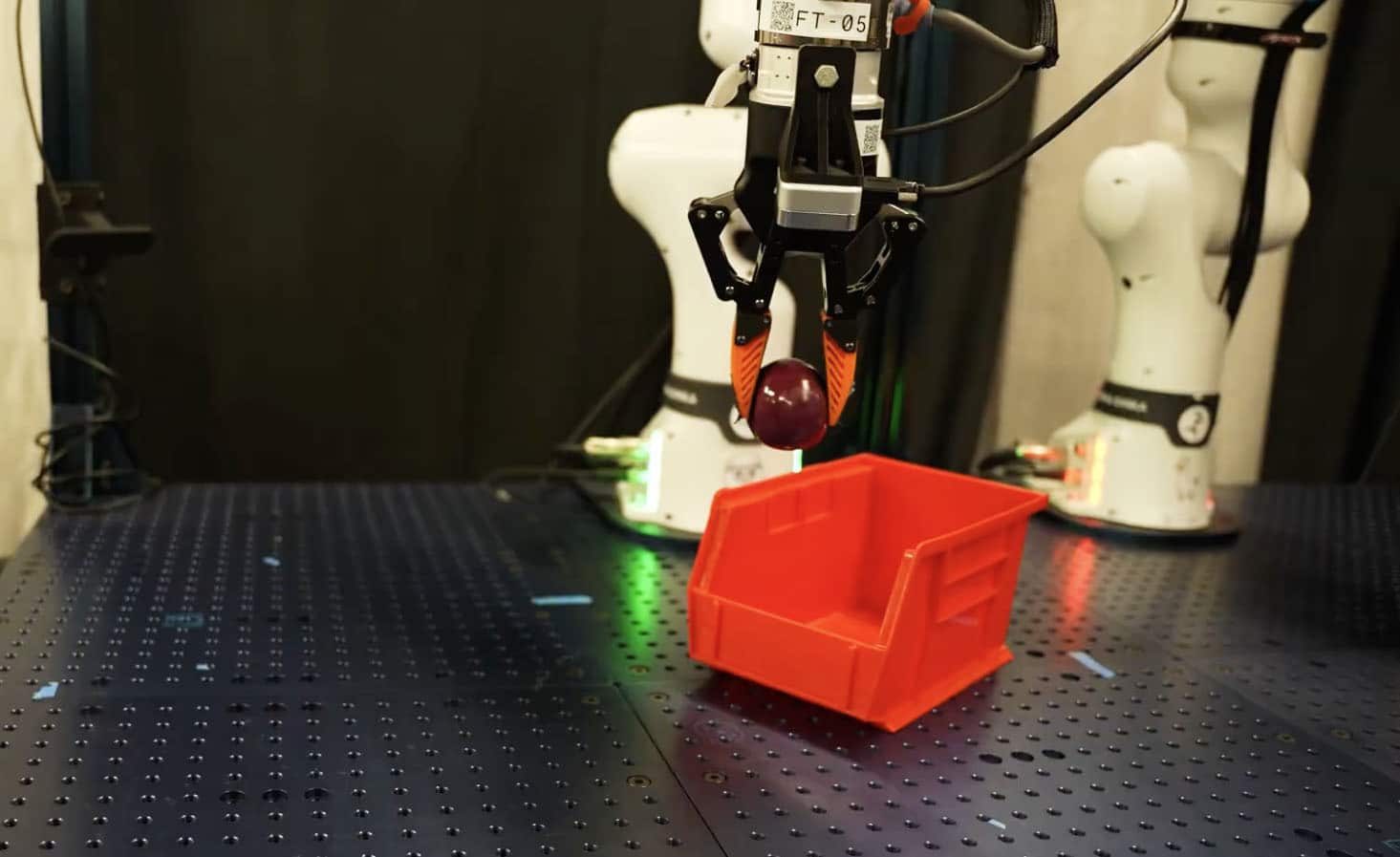
AthenaZero: A Bimanual Robot for Dynamic Manipulation
AthenaZero is a robotic manipulator built to tackle dynamic tasks like a human arm. This fast, precise robot can switch in an instant from a...
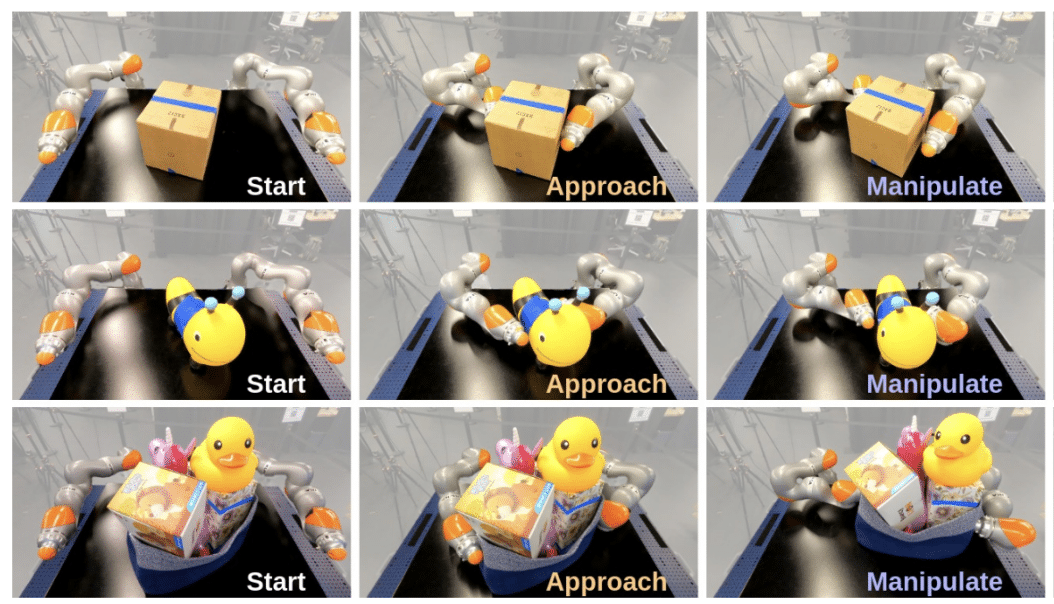
Planning-Guided Diffusion Policy Learning for Contact-Rich Bimanual Object Reorientation
We introduce Planning-Guided Diffusion Policy Learning (LIDE), an approach that effectively learns to solve contact-rich bimanual manipulation tasks by leveraging model-based motion planners to generate...
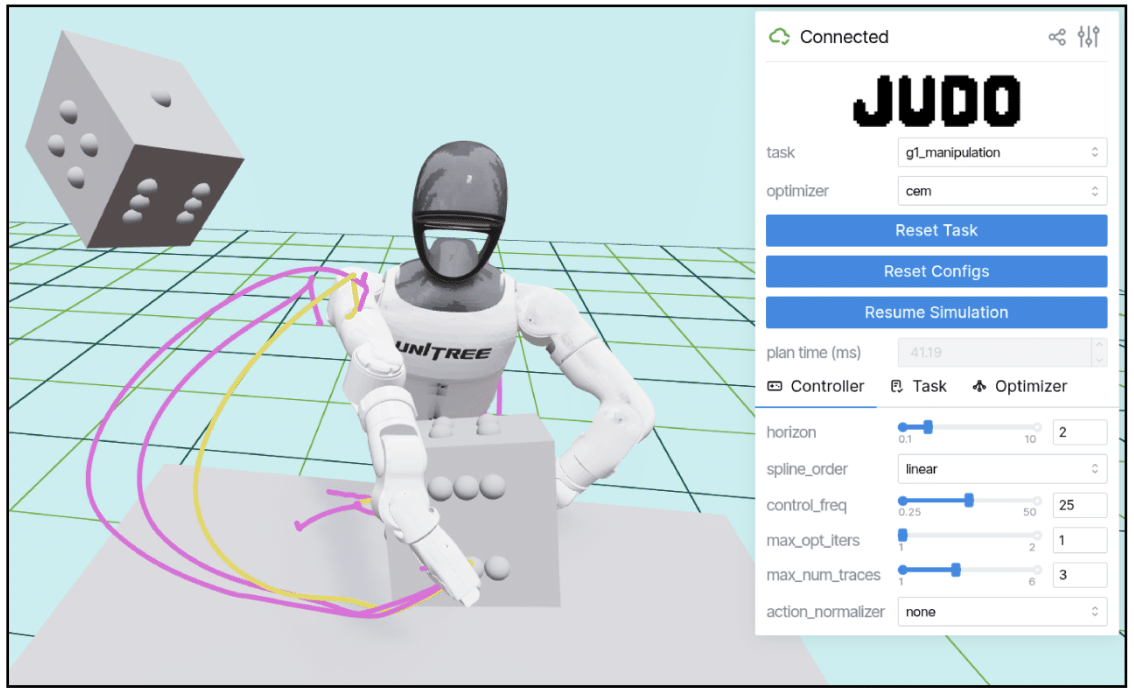
Judo: A User-Friendly Open-Source Package forSampling-Based Model Predictive Control
We introduce judo, a software package designed to help develop shared tools for prototyping, benchmarking, and deploying sampling-based controllers.
Robotic Dexterous Manipulation via Anisotropic Friction Modulation using Passive Rollers
We present the design and analysis of a robotic fingertip equipped with passive rollers that can be selectively braked or pivoted to modulate contact friction...
NovaFlow: Zero-Shot Manipulation viaActionable Flow from Generated Videos
We present NovaFlow, an autonomous manipulation framework that converts a task description into an actionable plan for a target robot without any demonstrations.

The RAI Institute Robot Lab: Studying Human Attitudes Towards Robots Through Experience
How a hands-on “Drive-a-Spot” experience significantly increased participants’ comfort with and perceived suitability for robots.