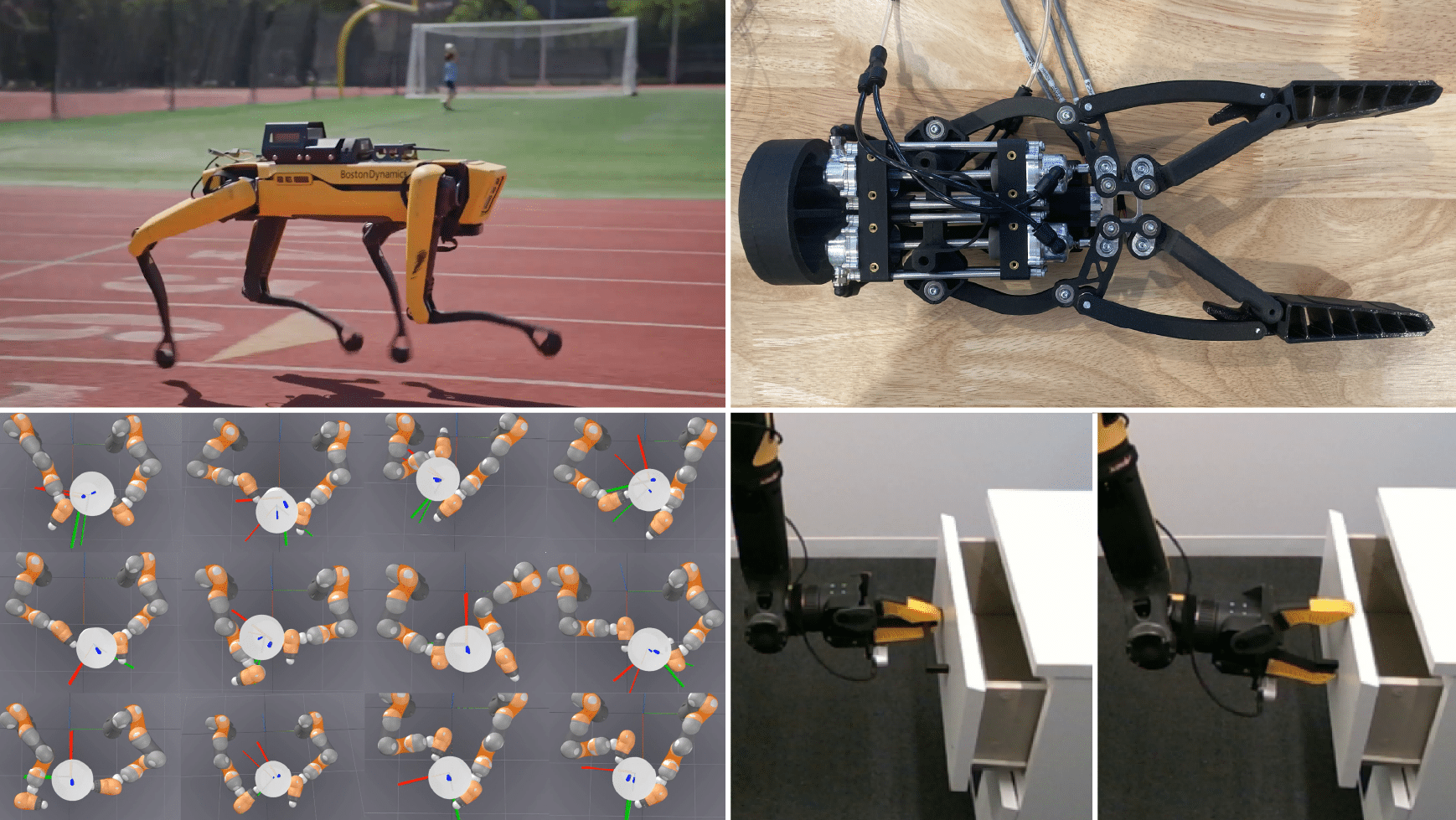

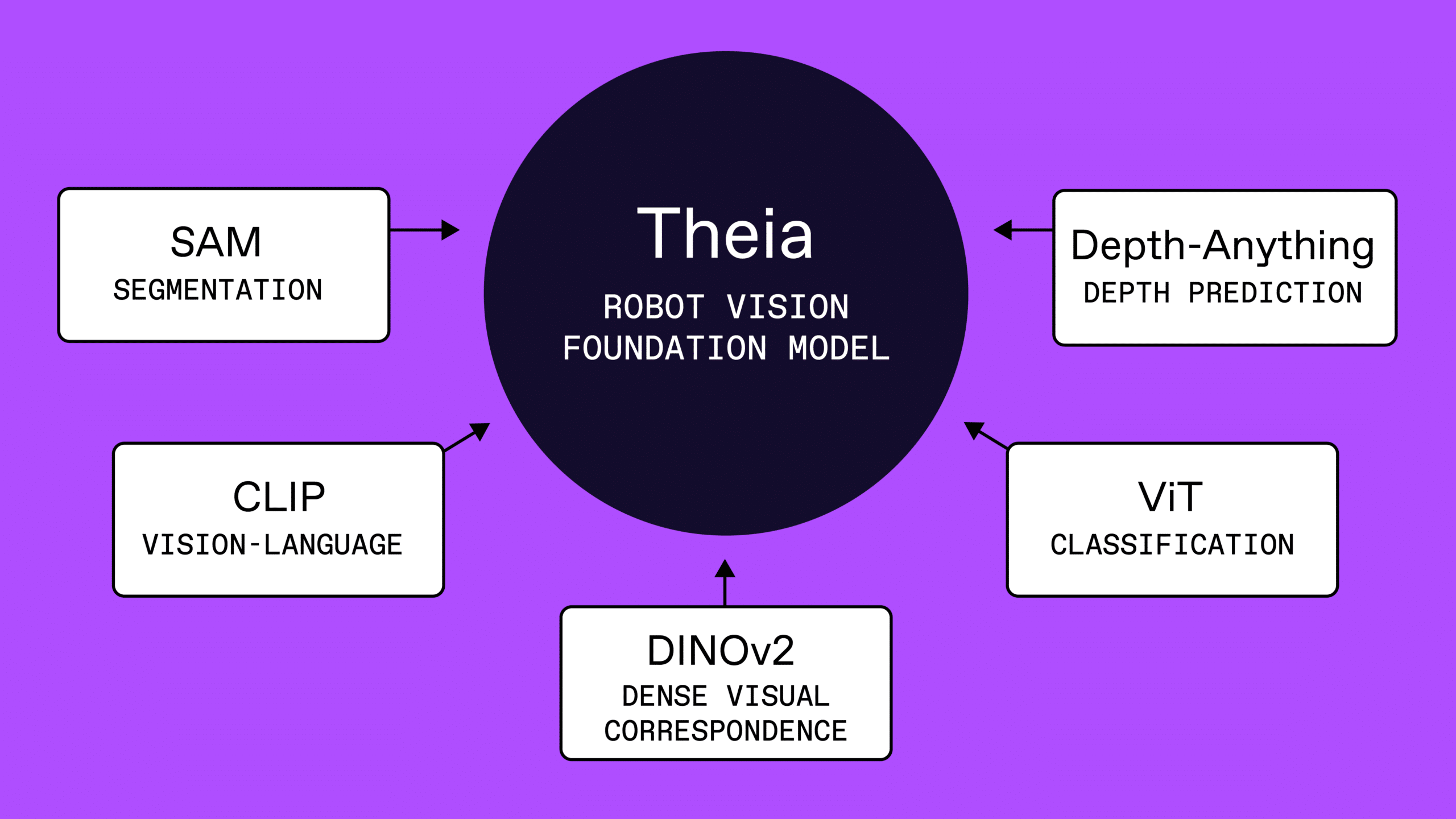
Introducing Theia, a vision foundation model for robotics developed by researchers at the Institute.
ICRA 2025 Publication Round-Up
The IEEE International Conference on Robotics and Automation (ICRA) will take place May 19 – 23, 2025 in Atlanta, Georgia. ICRA serves as the premier...


