Reinforcement Learning Accelerates Humanoid Behavior Production
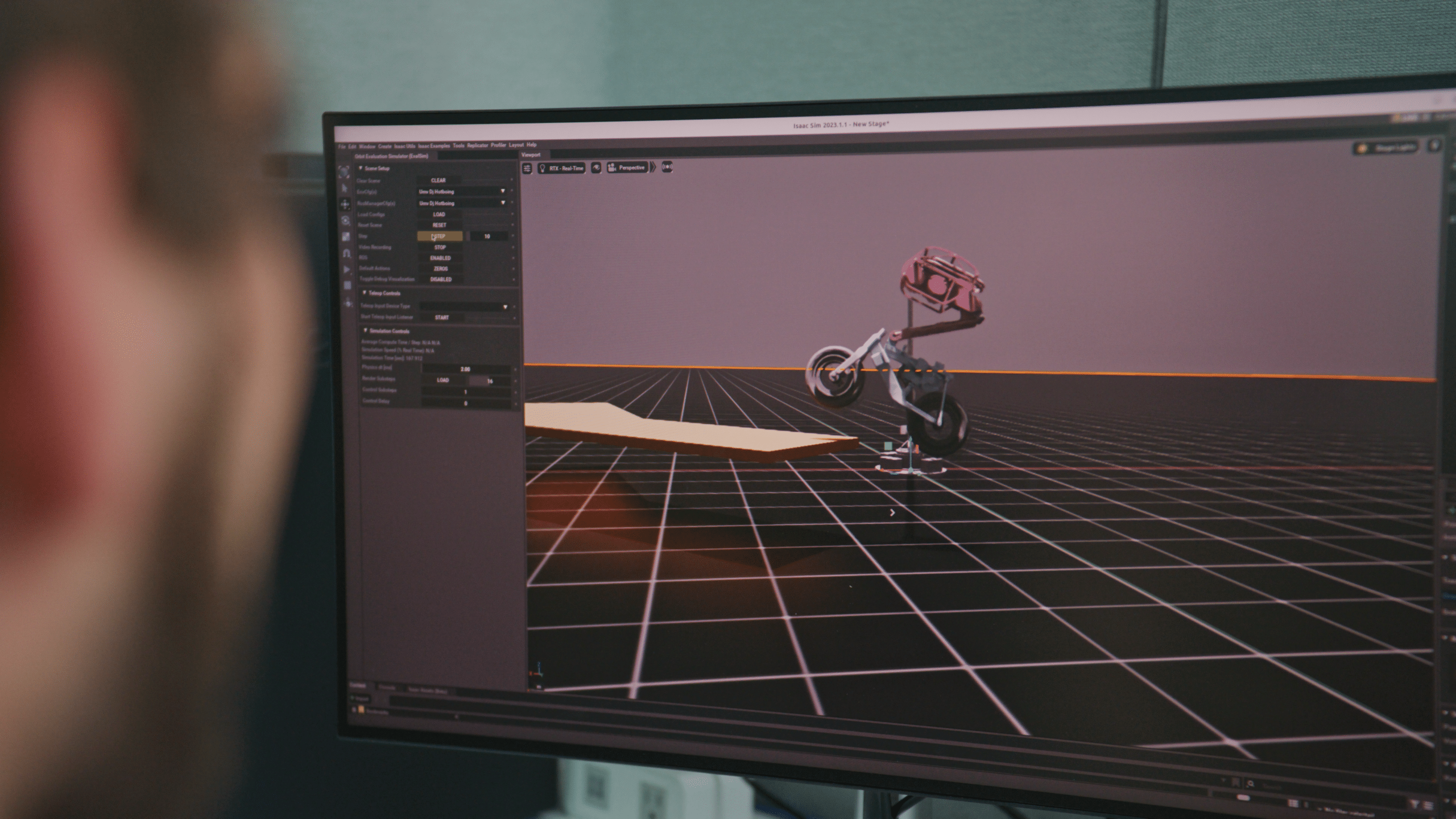
Reinforcement learning is used to speed the production of behavior for the Atlas humanoid robot. At the heart of the learning process is a physics-based...
We’ve opened a free, hands-on robot lab for the summer! Plan your visit.
By Topic:
By Type:
Reinforcement learning is used to speed the production of behavior for the Atlas humanoid robot. At the heart of the learning process is a physics-based...
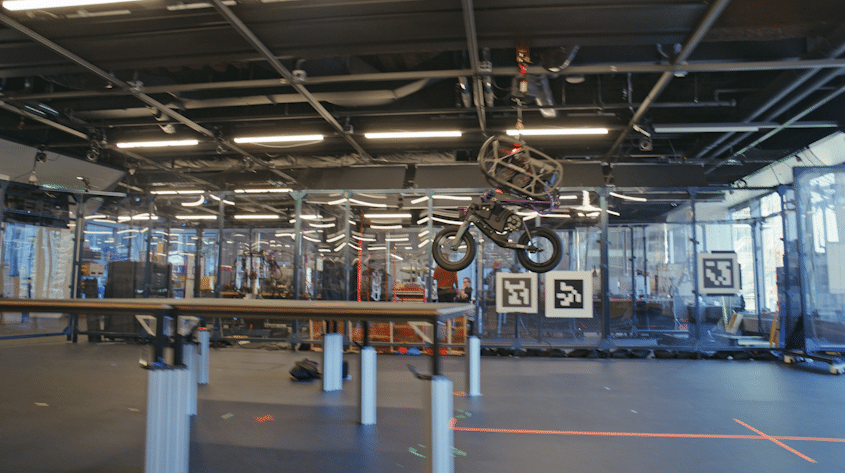
A look at the last couple of months, including new dexterity tasks, gait training, bigger jumps, and more.
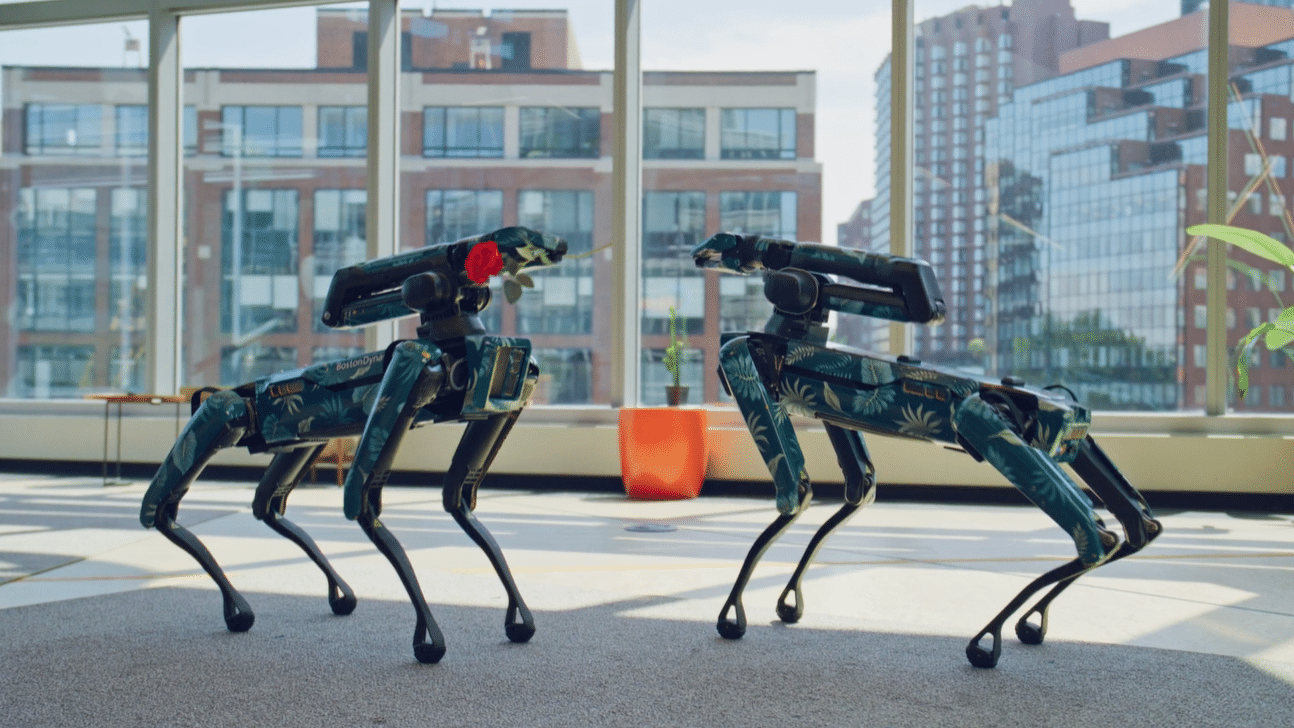
A look at the last couple of months, including robot training, new manipulation tasks, testing, and more.
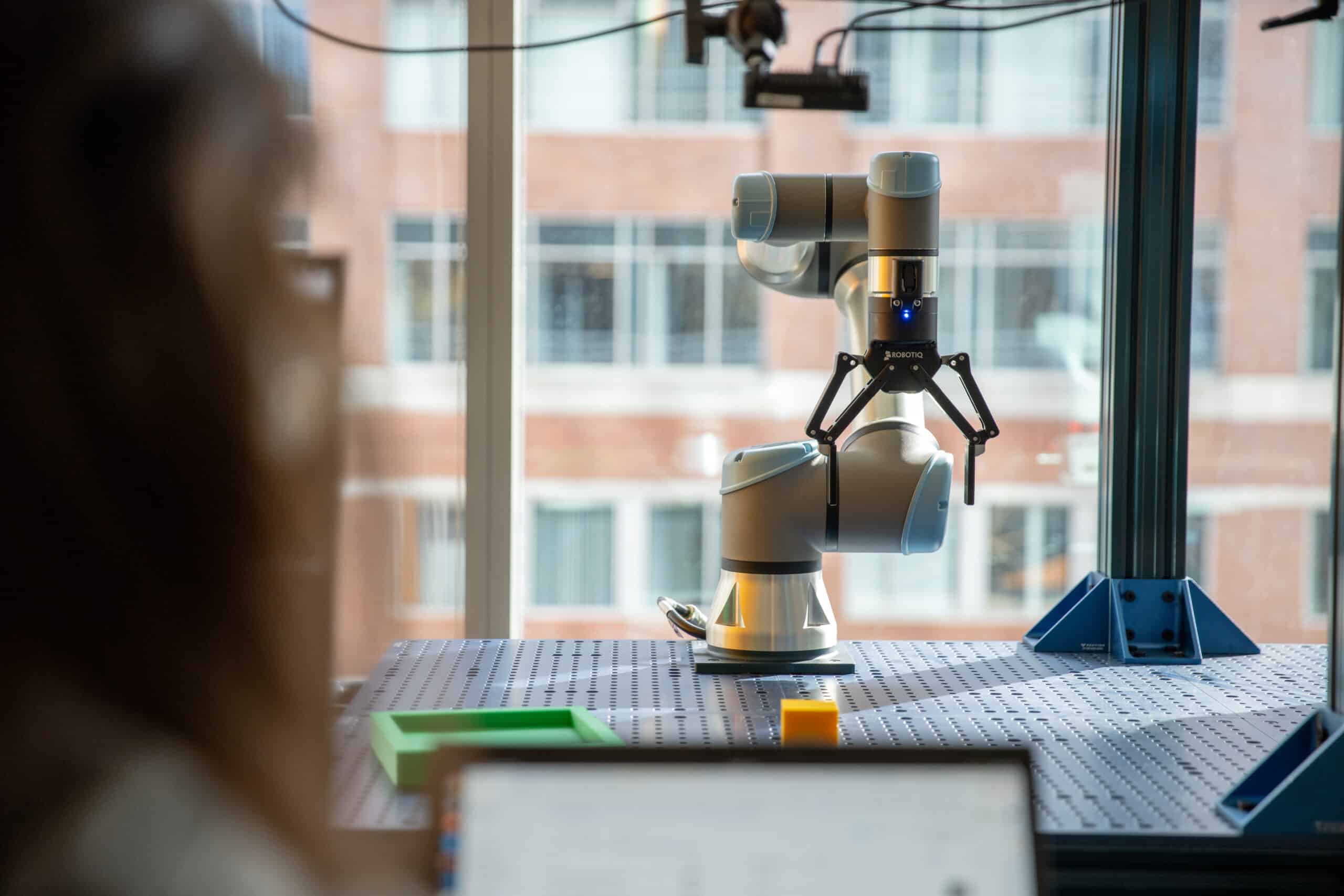
A look at the last couple of months, including new grippers, robot design, office views, and more.