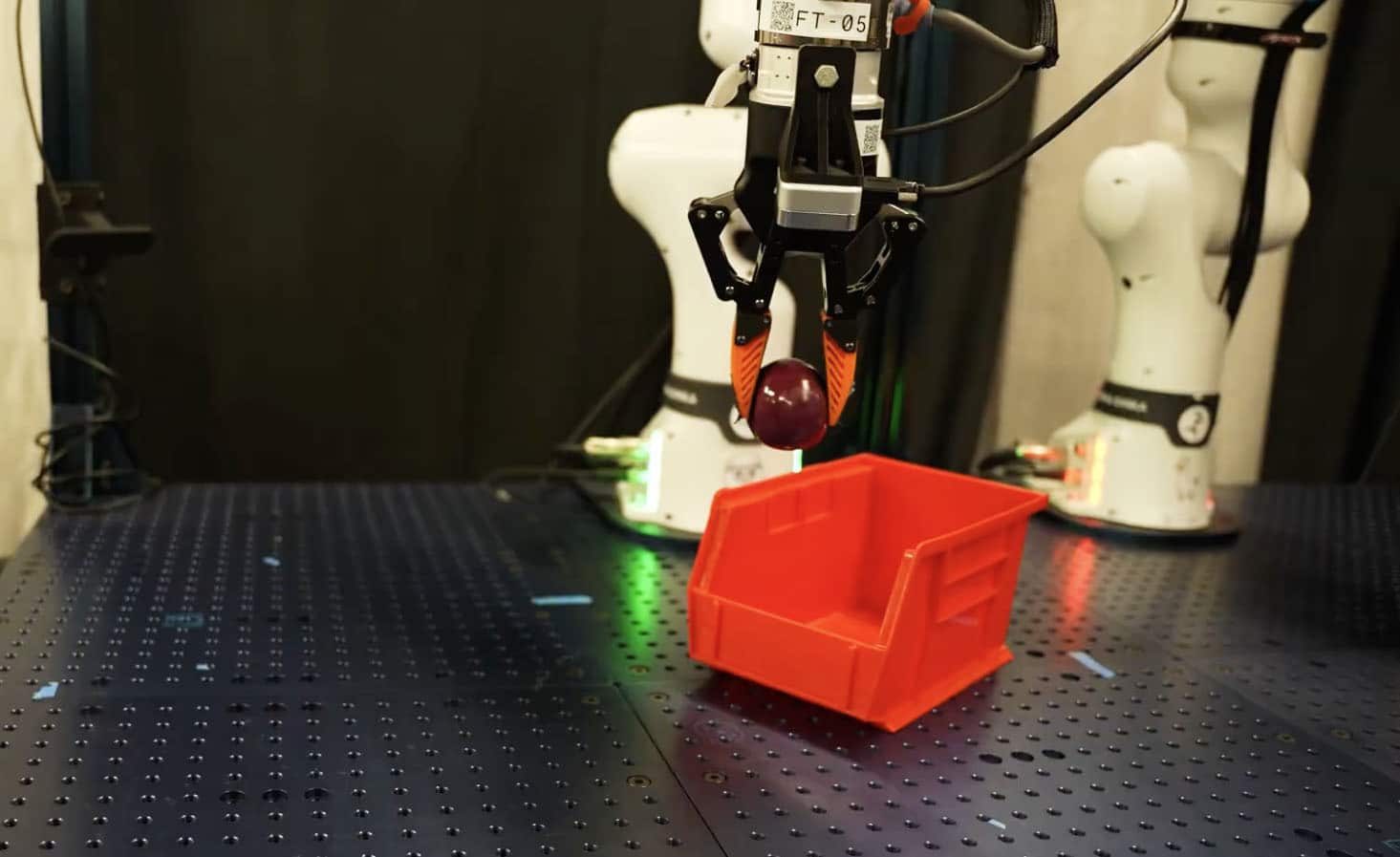
Automatically converting demos into labeled datasets to enable the rapid training of task-specific object detectors that outperform existing state-of-the-art VLMs.
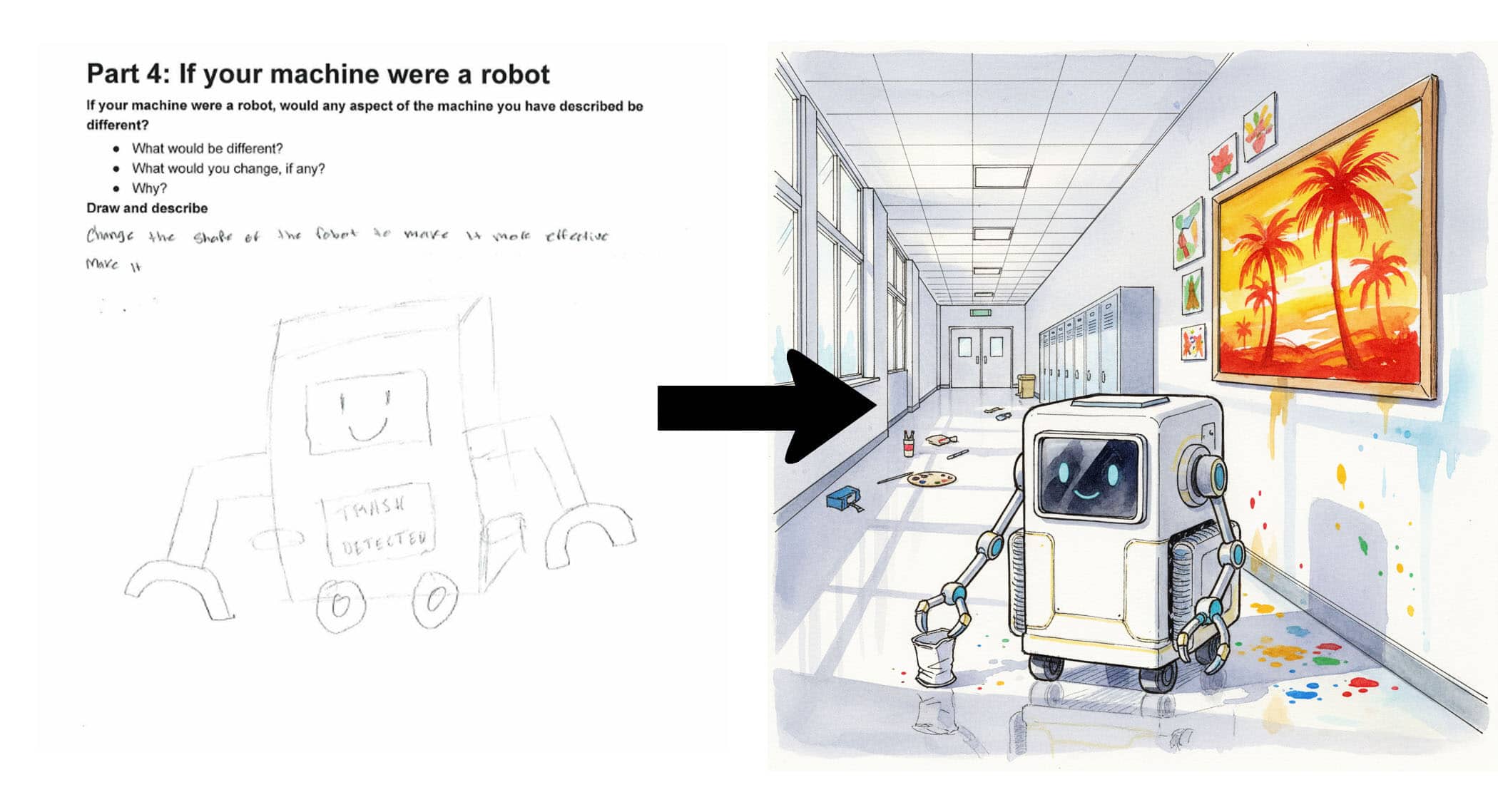
Robots For Everyday Life: Children’s Visions on Roles of Robots
To truly understand how children envision a robot-integrated future, we used personal photo probes and a scaffolded design process to first uncover the values and...