
How AnyTask and ExpertGen Bridge the Sim-to-Real Gap
A New Benchmark in Robot Juggling
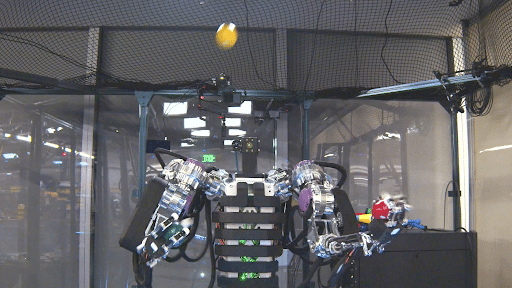
AthenaZero can juggle barehanded using onboard vision feedback. By using multi-fingered hands, it can transition seamlessly between a wide range of juggling patterns.
Video
Advanced Learning for Control