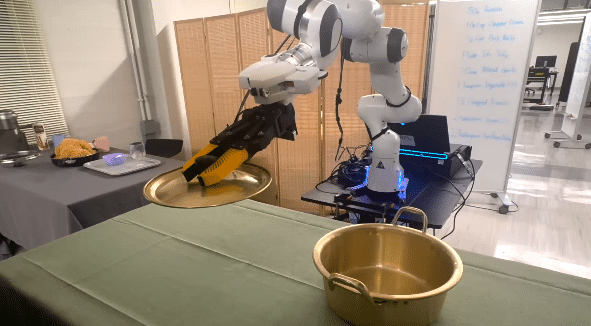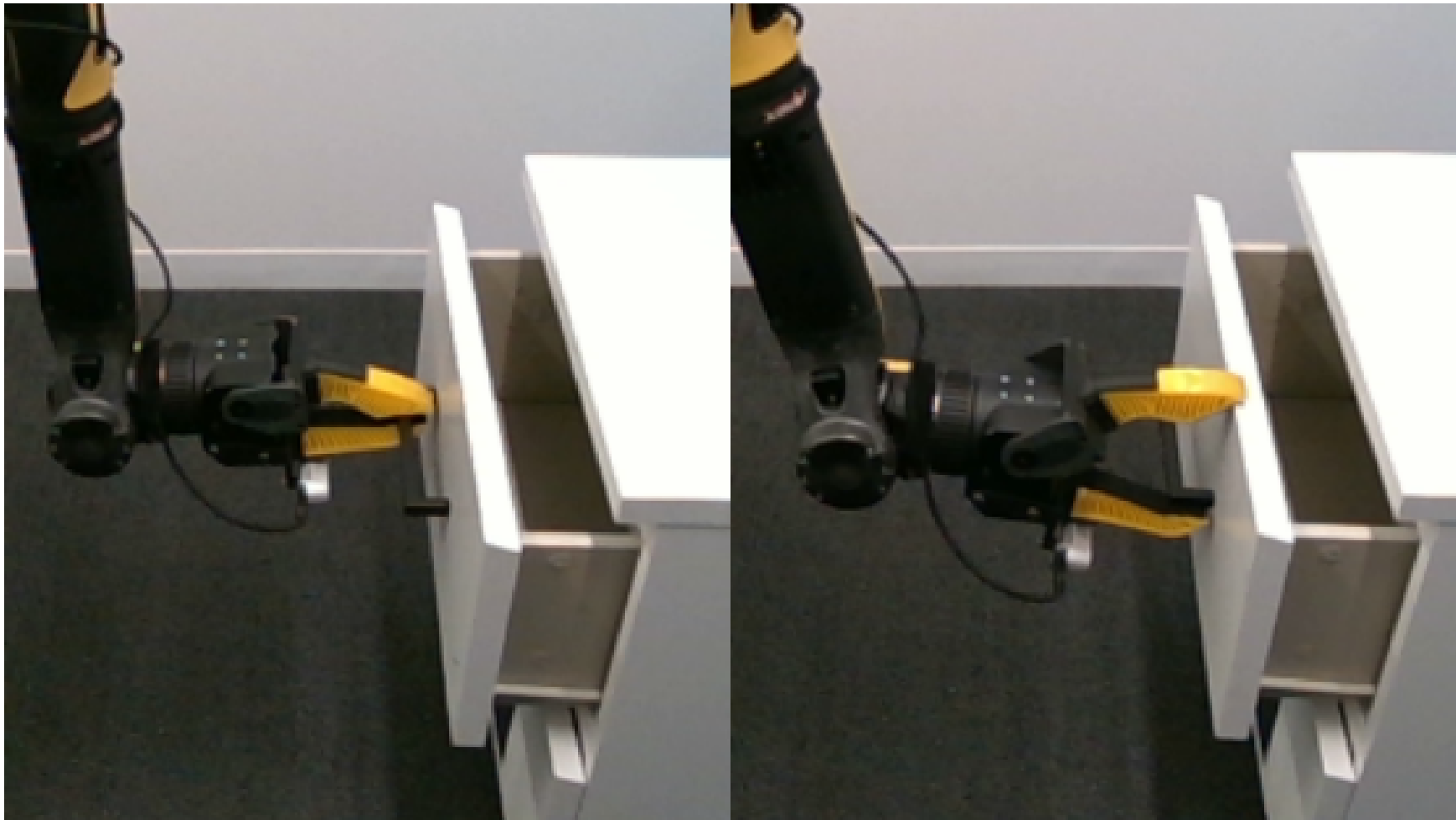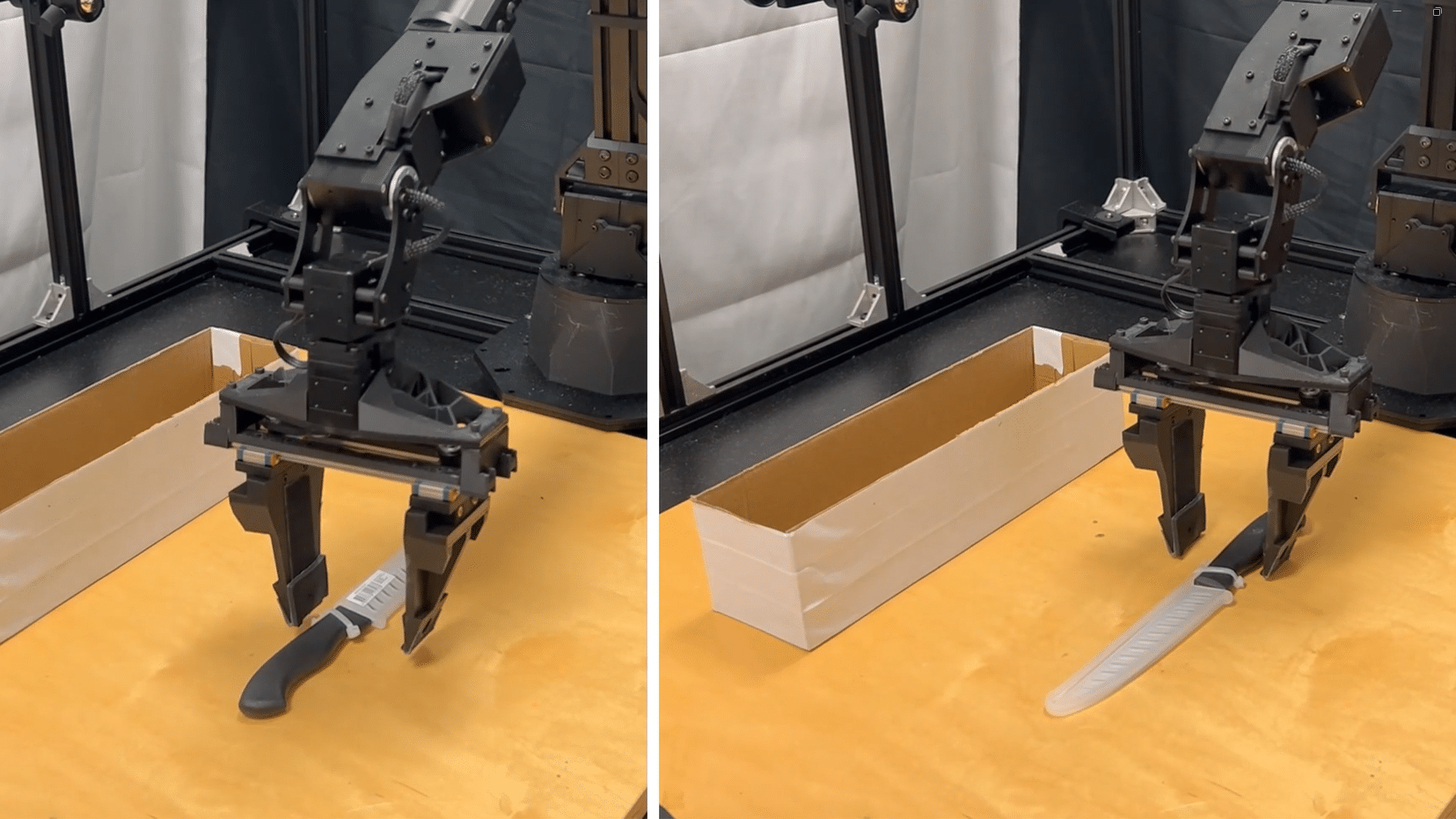
Researchers at the Institute examine the effectiveness of linear feedback controllers for contact-rich robotic manipulation, with differentiable simulations that use contact smoothing.
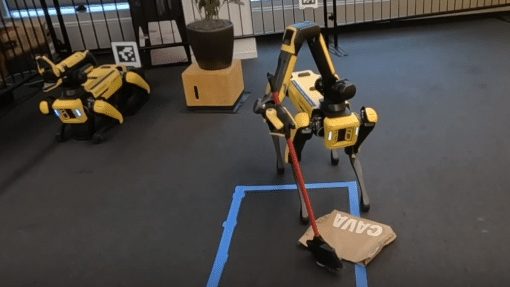
High-Performance Reinforcement Learning on Spot: Optimizing Simulation Parameters with Distributional Measures
This work presents an overview of the technical details behind a high-performance reinforcement learning policy deployment with the Spot RL Researcher Development Kit for low-level...