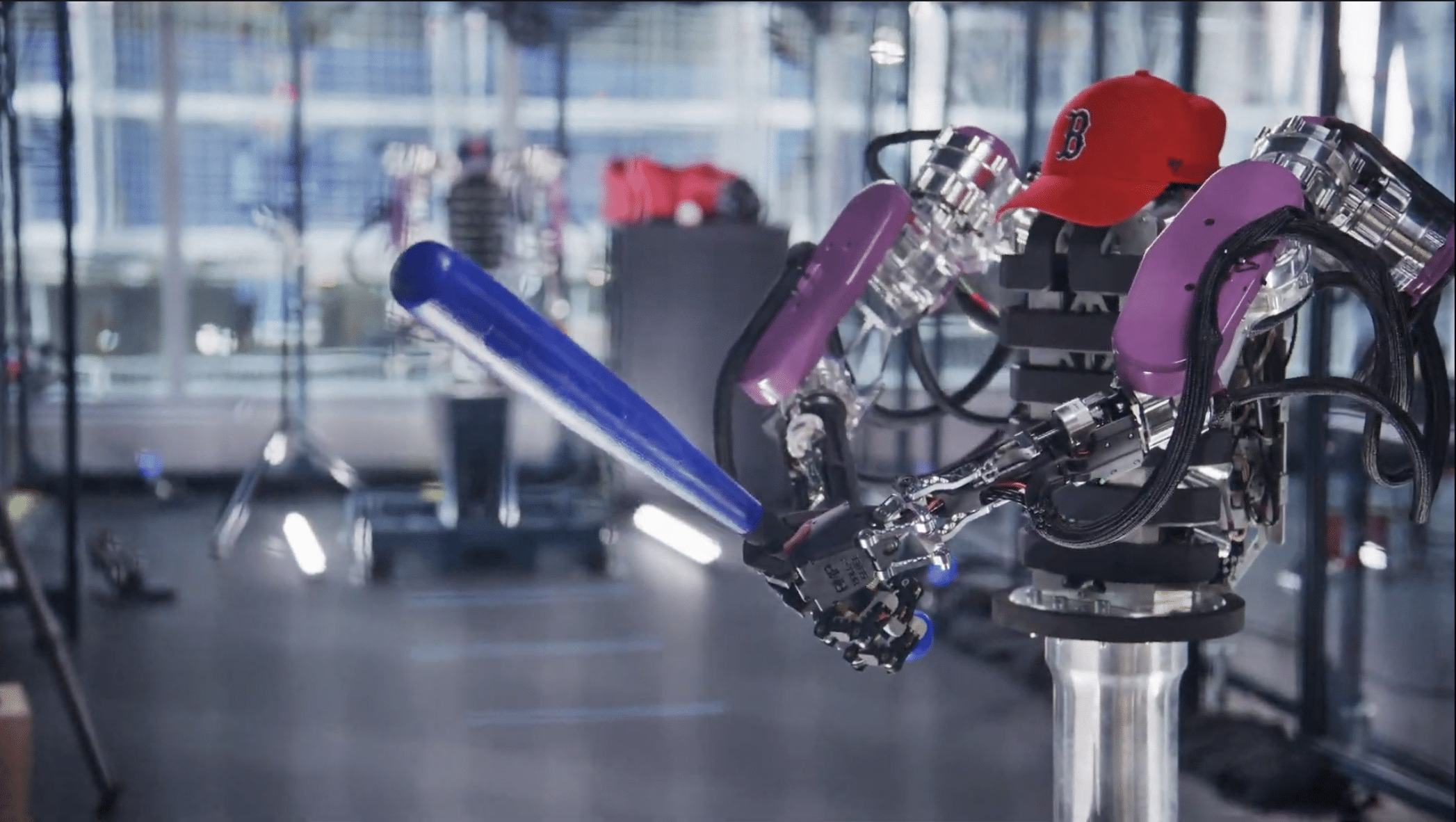
A Dynamic Robot That Can Throw, Catch, and Hit a Baseball
Researchers at the RAI Institute have built a low-impedance platform to study dynamic robot manipulation. In this demo, robots play a game of catch and participate in batting...
Oct 14, 2025
Video
Athletic Intelligence, Cognitive Intelligence
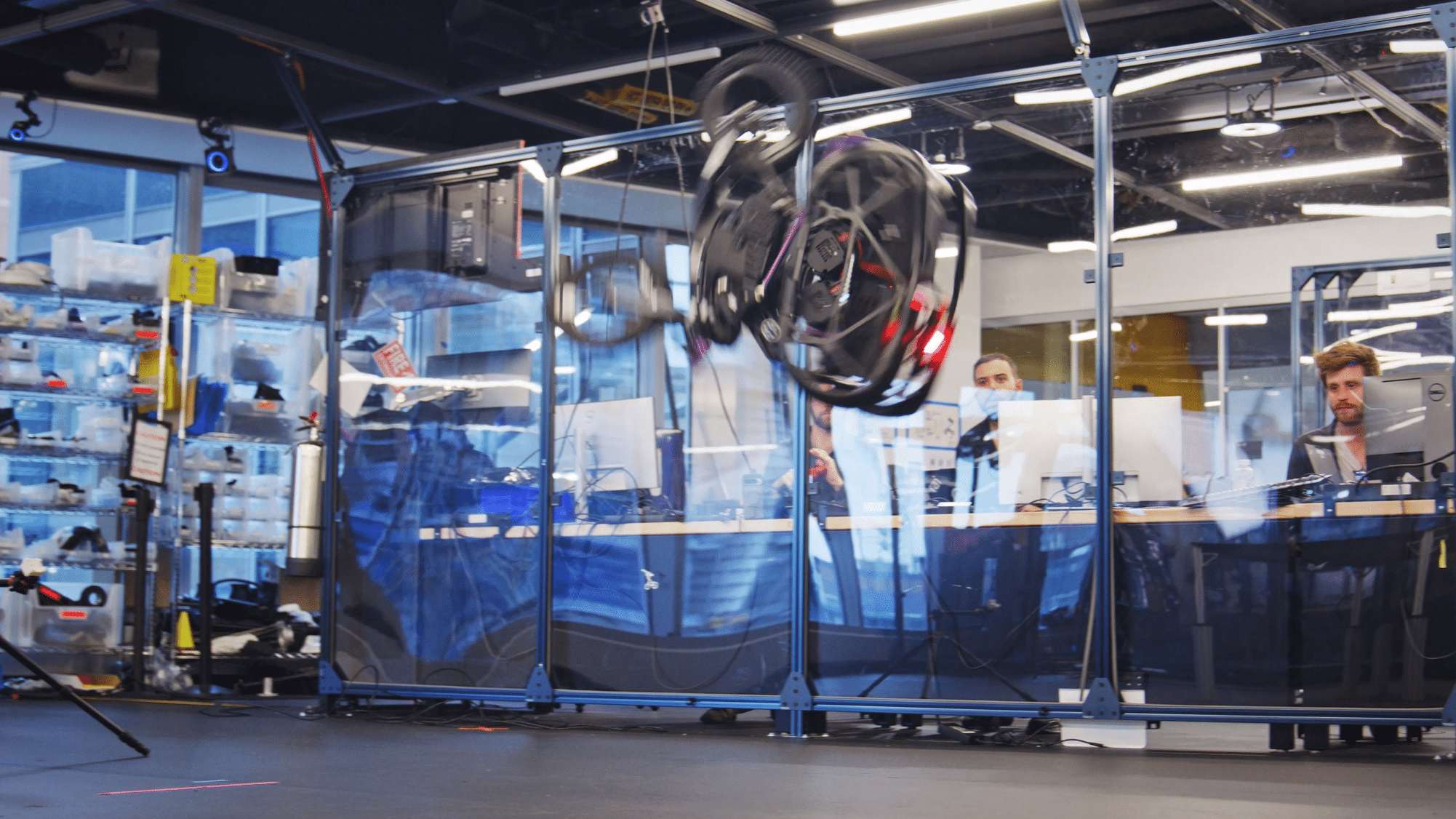
Spot robot performs dynamic whole-body manipulation using a combination of reinforcement learning and sampling-based control. Behavior shown in the video is fully autonomous, including the dynamic selection of contacts on the arm, legs and body, and coordination between the manipulation and locomotion processes. The tire weighs 15 kg (33 lbs), making its mass and inertial energy significant compared to the weight of the robot. An external motion capture system was used to simplify perception and an external computer linked by WiFi performed the intensive computational operations.
Researchers at the RAI Institute have built a low-impedance platform to study dynamic robot manipulation. In this demo, robots play a game of catch and participate in batting...
Using reinforcement learning we have expanded the range of techniques the Ultra Mobile Vehicle (UMV) uses to handle terrain and obstacles, including hops, out-of-plane balance, and level-ground flips....
Share