Abstract
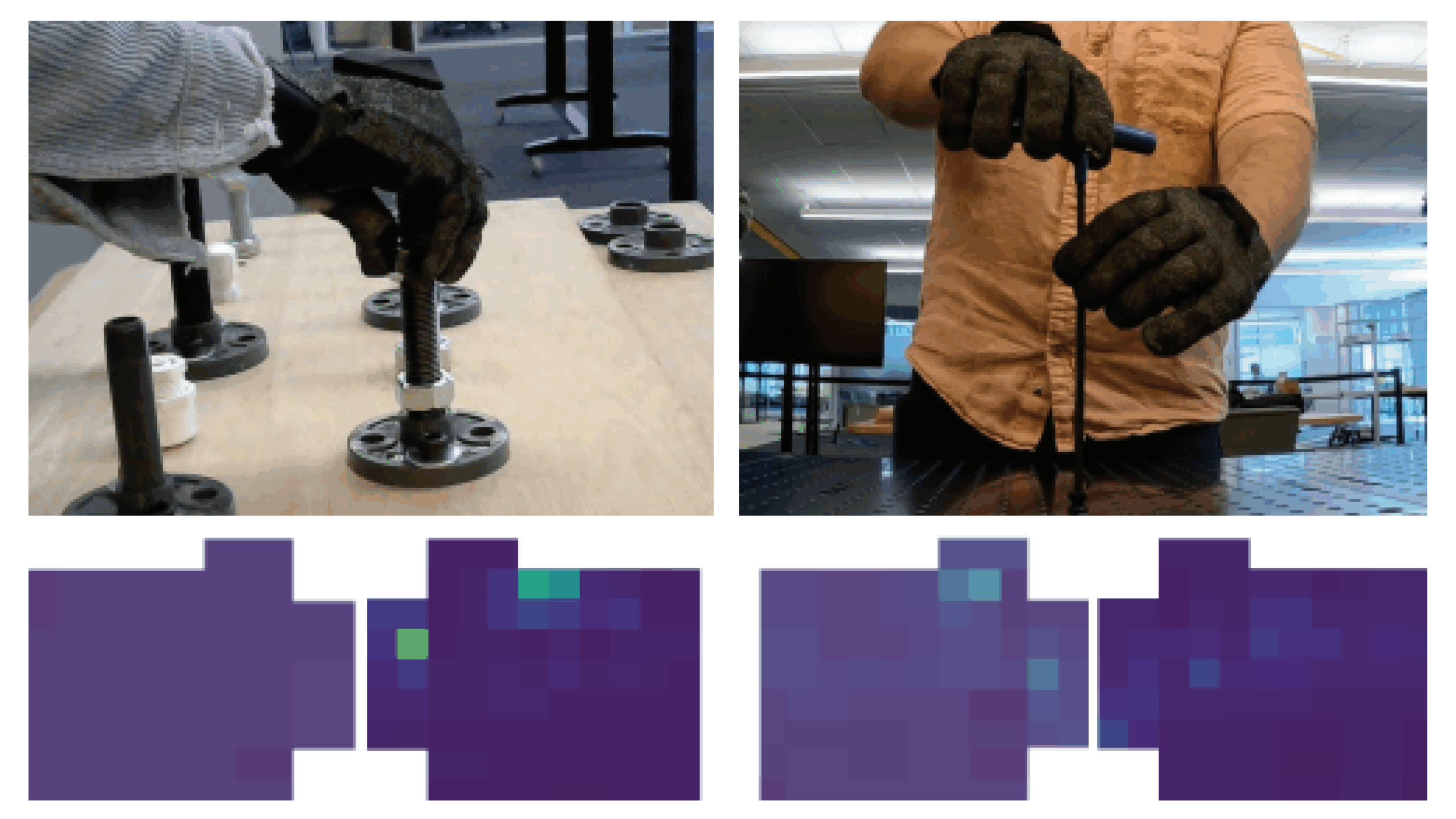
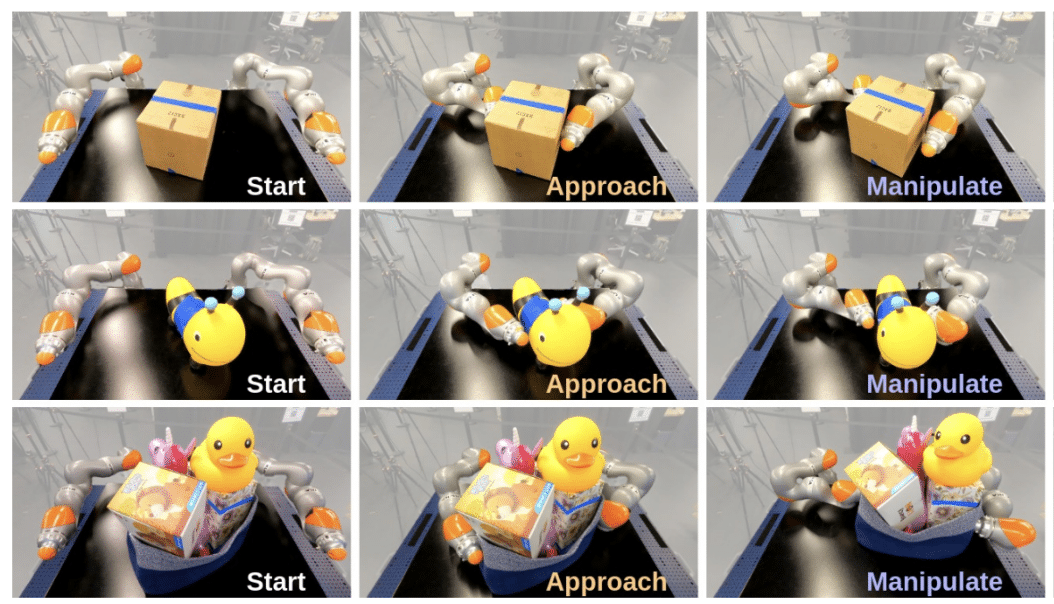
We present admittance control and fingertip contact detection with a linkage gripper remotely driven by a pneumatic rolling diaphragm actuator. The gripper is driven by underactuated mechanisms sensorized by joint encoders in order to fully determine the gripper state. We present the modelling of the linkage and fluidic transmission, validate its ability to regulate pinch force via admittance control within an RMS error well under 0.5 Newtons, and show the ability to detect contact at targeted locations on the linkage. In addition, we demonstrate simple grasping behaviors: blindly searching for an unobstructed object and detecting object loss. Our results show that an integrative approach of instrumenting underactuated gripper mechanisms can result in a lightweight gripper that is not only mechanically adaptive but sensitive enough to react to contact events without distal sensors or vision.